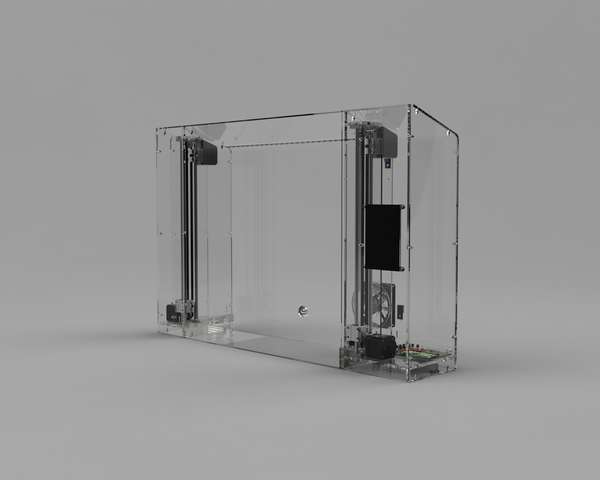
이것은 자신의 야채와 허브를 훨씬 쉽게 재배 할 수 있도록함으로써 건강한 식단을 장려해야하는 실내 온실입니다. 토양의 수분 센서를 사용하여 토양의 수분에 따라 식물에 자동으로 물을줍니다. 온실 내부와 외부의 온도와 습도를 측정하고 그에 따라 팬을 켜고 끕니다. 또한 터치스크린을 사용하여 열 수 있는 전동 도어가 있습니다. 터치 스크린은 온실의 모든 기능을 제어합니다. 플로트 게이지가있어 물이 너무 높으면 펌프가 켜지지 않고 식물을 담고있는 트레이가 넘치지 않습니다. 이것은 또한 트레이가 삽입되지 않을 때 펌프가 켜지지 않도록 하기 위해 작동합니다. 온실은 라즈베리 파이 제로에 의해 제어되지만 모든 코드를 직접 작성하면 Arduino를 사용하여 작동하도록 할 수 있습니다. 터치 스크린을 쉽게 연결하고 Pi에 물리적으로 연결할 필요없이 ssh를 통해 변경할 수 있도록 Raspberry Pi를 선택했습니다.

저장공간 부족으로 파일 업로드가 작동하지 않았으므로 대신 여기에 링크가 있습니다 https://a360.co/2K4SYdK
Fusion
myhub.autodesk360.com
자료
- 6mm 투명 아크릴 (또는 모든 색상) (https://www.amazon.co.uk/gp/product/B019H4GXW8/)
- 3mm 투명 아크릴
- 8mm 광택 스테인레스 스틸 막대 (지역 상점에서 구입했지만 3D 프린터 소모품으로 구입할 수 있어야합니다)
- 3mm 스테인레스 스틸 막대 (https://www.amazon.co.uk/gp/product/B00JR5C90S)
구성 요소
- 90° 파이프 커넥터(x2) (https://www.amazon.co.uk/gp/product/B008YGG416/)
- NPN 트랜지스터 (x9) (https://uk.rs-online.com/web/p/bjt-bipolar-transistors/6711119/)
- ADC용 16방향 DIL 소켓(x1) (https://uk.rs-online.com/web/p/dil-sockets/0813137/)
- 90mm PC 케이스 팬(x1)(https://www.amazon.co.uk/gp/product/B002KTZJOQ/)
- PVC 튜브 (https://www.amazon.co.uk/gp/product/B07CM22P9Z/)
- 마이크로 USB-마이크로 USB 케이블(x1) (https://www.amazon.co.uk/gp/product/B00RX1H9ZS/)
- 반사광 게이트(x1)(https://uk.rs-online.com/web/p/photoelectric-sensors/1944018/)
- MCP3008 ADC(x1)(https://uk.rs-online.com/web/p/general-purpose-adcs/6696064)
- DHT11 온도/습도 센서(x1/x2)(https://www.amazon.co.uk/gp/product/B06Y99X3NS)
- 암수 핀 헤더 (https://www.amazon.co.uk/gp/product/B01M69EA9O)
- 파이용 DC 전압 변환기(x1)(https://www.amazon.co.uk/gp/product/B071FT57SV/)
- 모터 케이블용 케이블 클립(x2/x3)(https://www.amazon.co.uk/gp/product/B07BFS6MM6/)
- 미니 HDMI-HDMI 케이블 (x1) (https://www.amazon.co.uk/gp/product/B01IKQMU6M/)
- 2mm 케이블 타이(https://www.amazon.co.uk/gp/product/B0094DE52I/)
- 실리콘 (https://www.amazon.co.uk/gp/product/B0046QFTKU/)
- 선형 베어링 (x4) (https://www.amazon.co.uk/gp/product/B077KQR45N/)
- 수중 펌프(x1) (https://www.amazon.co.uk/gp/product/B00LEETLS8/)
- TMC2208 스테퍼 모터 구동기(x2)(https://www.amazon.co.uk/gp/product/B07GTKM6FC/)
- 리드 샷 (1kg) (https://www.amazon.co.uk/gp/product/B006VWL7M6/)
- LED 스트립(https://www.amazon.co.uk/gp/product/B06W9LSB3R/)
- RFP20N06LE 모스펫 (x4) (https://www.amazon.co.uk/gp/product/B071VXRQYR/)
- 12V 전원 공급 장치(x1)(https://www.amazon.co.uk/gp/product/B01LYNOOB9/)
- 타이밍 벨트, 아이들러 및 풀리 (https://www.amazon.co.uk/gp/product/B07JGXG7S2/)
- 스테퍼 모터 (x2) (https://www.amazon.co.uk/gp/product/B07GLKQYWJ/)
- 라즈베리 파이 제로 (x1) (https://www.amazon.co.uk/Raspberry-Pi-Zero-Starter...
- 터치 스크린(x1) (https://www.amazon.co.uk/gp/product/B07JFHGQY7/
1단계: 구조적으로 통합된 부품의 레이저 절단
- 이들은 모두 6mm 투명 아크릴로 만들어졌습니다.
- 모든 나사 구멍은 접시형이어야 합니다.
- 레이저 절단을위한 .dxf 파일은 structurally_integral_parts.zip에서 찾을 수 있습니다.
- left_motor_wall 및 right_motor_wall 소켓 헤드 나사가 같은 높이에 놓일 수 있도록 라우팅해야 합니다(아크릴이 녹기 때문에 라우팅이 작동하지 않았습니다. 나는 레이저 커터를 사용하여 적절한 깊이로 조각했습니다)
2 단계 : 레이저 절단 지붕 굽힘 패턴
- 이 중 4 개가 필요합니다.
- 나는 이것을 8mm MDF에서 잘라 냈지만 실제로 원하는대로 사용할 수 있습니다.
- 구멍은 네 부분을 정렬하기 위해 다웰을 통과시키기위한 것이지만 결국 사용하지 않았으므로 어떤 것이 효과가 있는지 확인해야합니다.
3단계: 패널, 도어 및 지붕의 레이저 절단
- 이 모든 부품은 3mm 투명 아크릴로 절단됩니다.
- 패널과 지붕은 구부릴 수 있도록 필요한 것보다 약간 깁니다.
- 나사 구멍은 구부린 후 정확한 위치를 알 수 없기 때문에 패널과 지붕의 한쪽에만 존재하므로 나중에 나머지 구멍을 직접 뚫어야 합니다.
- 도어의 나사 구멍은 절단되지 않지만 타이밍 벨트를 자르는 방법에 따라 위치가 다르므로 드릴링해야 합니다.
- 모든 구멍 카운터싱크(올바른 쪽에서 구멍을 카운터싱크하는지 주의)
4 단계 : 패널 굽힘

- 굽힘이 가야 할 위치를 측정하고 표시합니다 (확실하지 않은 경우 3D 모델 참조).
- 방금 표시한 라인에서 열선 스트립 히터를 사용하여 가열합니다(대신 히트 건을 사용할 수 있지만 잘 구부리기가 훨씬 더 어려워짐).
- 그런 다음 모두 90°로 구부립니다(올바른 방향으로 구부리는지 주의하십시오).
5 단계 : 지붕 굽힘


- 너트와 볼트를 사용하여 굽힘 패턴 조각을 부착합니다.
- 열선 스트립 히터를 사용한 열
- 평평한 표면에 패턴 주위를 구부리십시오.
6 단계 : 지붕에 구멍 뚫기
- 벤드 패턴의 구멍을 사용하여 지붕 상단에서 구멍이 있어야 하는 위치를 표시합니다.
- 3mm 드릴 비트로 이 구멍을 뚫습니다.
- 이 구멍에 대한 카운터 싱크
7단계: 라즈베리 파이 설정
- 다음 지침에 따라 OS 이미지를 SD 카드에 씁니다 https://www.raspberrypi.org/documentation/installation/installing-images/README.md
- SD 카드를 파이에 넣습니다.
- Pi에 전원을 공급하고 모니터, 마우스 및 키보드 연결
- 터미널 열기
- github에서 내 저장소 복제
git clone https://github.com/conition/greenhouse.git- 피그피오 설치
sudo apt-get install pigpio python-pigpio python3-pigpio- 부팅 시 pigpio 데몬을 시작할 수 있도록 설정
sudo systemctl enable pigpiod- GTK+3 설치
sudo apt install python-gi python-gi-cairo python3-gi python3-gi-cairo gir1.2-gtk-3.0- 온실 디렉토리로 변경
cd greenhouse- 온실 UI 자동 시작 설정
mkdir /home/pi/.config/autostart cp greenhouse_ui.desktop /home/pi/.config/autostart/
- 파이 재부팅
sudo reboot
- Pi가 부팅되면 UI가 자동으로 시작되고 모든 것이 작동합니다 (UI가로드되는 데 시간이 걸리므로 1-2 분 동안 표시되지 않더라도 걱정하지 마십시오)
8 단계 : PCB
- PCB를 만들었습니다
- 그것을 얻으려면 업로드하기만 하면 gerber_files.zip
- 수정하려는 경우를 대비하여 Autodesk Eagle 회로도 및 보드도 포함했습니다.
9단계: PCB 납땜
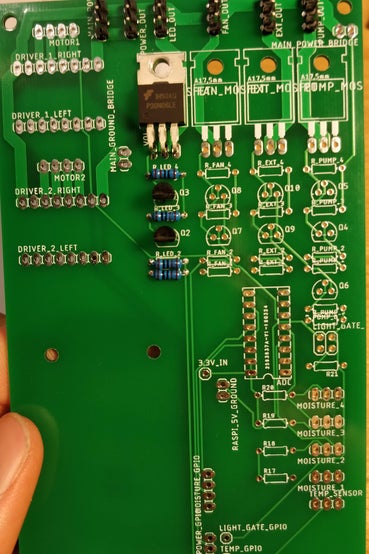
- 회로도.pdf 및 보드.pdf를 참조로 사용하여 모든 구성 요소에서 납땜
- 모터 드라이버 헤더를 제외한 모든 헤더는 수 헤더입니다.
- 소켓에 ADC 솔더의 경우 칩을 연결하십시오.
- MAIN_GROUND_BRIDGE 및 MAIN_POWER_BRIDGE의 경우 저항기 또는 케이블의 잘린 다리에 납땜하여 두 접점을 연결하기 만하면됩니다.
- 이미지는 PCB가 어떻게 생겼는지와 약간 다릅니다., 온실을 만들고 몇 가지 오류를 찾은 이후로 PCB를 업데이트했기 때문입니다.
10단계: 카운터웨이트 3D 프린팅
- 이 두 모델을 3D 프린팅
- 슬라이서에서 각각을 미러링하고 다시 인쇄
11단계: 카운터웨이트 채우기
- 균형추 본체와 뚜껑을 저울에 놓습니다.
- 가득 찰 때까지 또는 475g에 도달 할 때까지 리드 샷으로 채우십시오.
- 두 번째 카운터웨이트에 대해 반복합니다.
12단계: 벨트 홀더
- 3D 모델에서 볼 수 있듯이 이것을 보고 뚫습니다.
- 알루미늄 스트립으로 만들었지 만 기본적으로 모든 재료를 사용할 수 있습니다.
- 이 중 6 개가 필요합니다.
- 퍼즐을 사용하여 내 것을 만들었지 만 어떤 톱도 괜찮습니다.
- 그런 다음 나사와 베어링을 사용하여 맞는지 테스트해야 합니다.
- 나사산이 끝까지 통과하지 않았기 때문에 베어링을 두드려야했습니다.
13 단계 : 베어링로드

- 4mm 광택 스테인리스 스틸 막대에서 445 x 8mm 막대를 톱으로 보았습니다.
- 베어링이 계속 갈 수 있도록 가장자리를 샌딩하십시오.
- 나는 쇠톱을 사용하여 이것을 톱질했지만 다시 어떤 톱도 괜찮습니다.
- 그런 다음 베어링이 잘 미끄러지는지 테스트해야 합니다.
14단계: 수분 센서

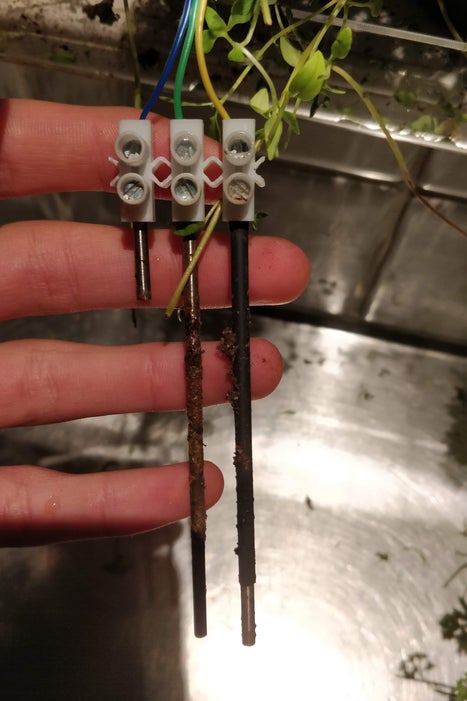
- 3mm 스테인리스 스틸 막대를 대략 같은 8개의 조각으로 자르고 식물 화분 높이보다 길지 않아야 합니다.
- 다른 4 개를 길이의 절반 또는 다른 것보다 짧게 자릅니다.
- 쇠톱으로 막대를 통과 할 수 없어서 드레멜을 사용해야했지만 쇠톱으로자를 수 있습니다.
- 위의 이미지에서 볼 수 있듯이 막대를 조입니다.
- 열수축 튜브를 올바른 크기로 자르고 가장 단단한 막대에 감고 히트 건을 사용하여 수축시킵니다.
- 이제 케이블을 3x1 커넥터로 압착하고 끝을 주석 코팅한 다음 위 이미지와 같이 끝을 터미널 블록에 나사로 고정합니다.
15 단계 : 트레이

- 3mm 투명 아크릴로 만든 레이저 컷 tray_main_body.dxf
- 구부릴 위치 측정
- 열선 스트립 히터에서 가열하십시오.
- 양쪽을 90°로 구부립니다.
- 위 이미지에서 볼 수 있듯이 본체 양쪽 측면의 내부 윤곽을 6mm 투명 아크릴 조각으로 추적합니다.
- 이것들을 보았습니다 (스크롤 톱을 사용했지만 얇은 날이있는 톱은 괜찮을 것입니다)
- 아크릴 양쪽에 마스킹 테이프를 붙여야하므로 녹지 않습니다.
- 아크릴 시멘트와 클램프를 사용하여 벽을 본체에 붙입니다.
- 실리콘을 사용하여 트레이를 밀봉하십시오.
16단계: 플로트 게이지
- float_gauge.stl을 3D 인쇄하려고했지만 떠 다니지 않았으므로 거품이나 무언가를 사용하여 뜨게 만들어야 할 수도 있습니다.
- 반사광 게이트를 향한 쪽에 페인트하여 아래쪽 절반은 검은색이고 위쪽 절반은 흰색이 되도록 합니다(물이 넘치지 않도록 검은색과 흰색의 비율로 약간 실험해야 할 수도 있음).
- 플로트 게이지는 물이 넘치지 않도록 제자리에 있으며 트레이가 삽입되지 않았을 때 펌프가 켜지지 않도록합니다.
- 레이저 절단 float_gauge_base_plate.dxf
- 2mm 스테인리스 스틸 막대의 50 x 3mm 길이 절단
- 아크릴 시멘트를 사용하여 반사광 게이트에서 적절한 거리에 베이스 플레이트를 트레이에 붙입니다.
- 막대를 베이스 플레이트에 넣습니다.
- 플로트 게이지 본체를 막대에 놓습니다.
17단계: 컨트롤 타워 조립
- 백 베어링을 벨트에 부착합니다.
- 로드 홀더를 사용하여 타이밍 벨트와 베어링 로드를 삽입합니다.
- 카운터 웨이트를 후면 베어링에 부착합니다 (카운터 웨이트 측면에 펠트 스트립을 붙여서 벽에 더 잘 미끄러 질 수 있도록)
- 베어링이 더 잘 미끄러질 수 있도록 약간의 오일을 베어링에 발라야 했습니다.
- 왼쪽 컨트롤 타워에 대해 반복합니다.
- M3 나사와 스페이서를 사용하여 Pi를 PCB에 장착합니다(Pi의 구멍을 넓히려면 3mm 드릴 비트를 사용해야 할 수 있음).
- 바닥에서 플레이트를 통해 M3 나사를 사용하여 PCB를 오른쪽 컨트롤 타워의 바닥 판에 장착한 다음 두 개의 너트를 스페이서로 사용하고 PCB 상단에 다른 너트를 사용하여 제자리에 고정합니다.
18 단계 : 지붕 조립

- 6mm 아크릴로 만든 레이저 절단 fan_ring.dxf 및 water_inlet.dxf
- 아크릴 시멘트와 클램프를 사용하여 지붕에 붙입니다.
19단계: 케이블 준비 및 연결
- 모든 케이블을 자르고 압착하십시오.
- PCB의 헤더는 Pi의 헤더와 정렬됩니다.
- 이를 위해 짧은 케이블을 압착할 수 있지만 점퍼 케이블만 사용할 수도 있습니다.
- 수분 chip_select 핀은 Pi의 해당 핀과 정렬되지 않으며 GPIO8(CE0_N)에 연결해야 합니다.
- 모터 커넥터는 모터가 반대 방향으로 회전하도록 반대 방향으로 연결되어야 합니다.
- 외부 DHT11 센서는 GPIO17과 3.3V 및 접지 핀에 연결됩니다.
20단계: 도어 부착
- 가장 낮은 지점에서 베어링에 대한 도어를 잡고 구멍이 있어야 할 위치를 표시하십시오.
- 구멍을 뚫고 카운터 싱크
- 베어링에 도어 장착
21단계: 지붕 부착




댓글